
Today, I told a work colleague about a drone dragging a human on a wakeboard behind it. He was surprised, but after this conversation, I was wondering whether there are drones that can completely lift a person. Then I did some research, and here is a small summary of what I found.
Can a drone lift a person? Yes, big drones can carry a person. The ability to lift things depends on the power, the dead weight, the number of motors, and the type of propellers of the drone. Also important when lifting heavy loads is the drone’s position and how the load is attached to the drone.
There are many different drones with different payloads and applications.
Types of heavy drones
Drones are moving into more and more practical applications. This development is possibly due to improved control technology and increased battery performance.
It all started with the military drones during World War II. The general public came to drone technology via amateur drones and toy drones. Now, industrial applications are being developed that will revolutionize civil aviation.
What types of heavy payload drones are there?
Let’s start with small industrial drones. Drones like the MG series from DJI can carry up to 22lbs (10kg). This is enough for a high-quality camera, fertilizers or seeds for agriculture, or a cable for cable cars.

The company Schiebel developed a helicopter drone with a payload of 75lbs (34kg) for military observation. https://schiebel.net/

Volocopter is the first commercial person-carrying drone with a payload of 350lbs (160kg). This system is also one of the first possible drone taxis in Dubai.

Aerones developed a drone for extinguishing fires from a height of 85m. This drone has a weight of 150lbs (70kg) and can carry about 220lbs (100kg).
I found the next-highest category of drones in Russia in the form of a transport drone from the company SKYF. It is a truss structure consisting of two large counter-rotating main rotors and eight smaller control rotors. It can lift loads of up to 550lbs (250kg).

That’s all I’ve found in the field of civil aviation: other than that, there are only military applications. The drone with the highest payload is the MQ-4 Triton. It is an aircraft drone with a payload of up to 3000lbs (1360kg).
There will be a lot of developments in this area over the next few years. If laws are enacted for autonomous flying, more person-carrying drones will be developed as well as additional transport drones.
Flying with a drone made of a bathtub
“The Real-Life Guys” in Germany wanted to build a person-carrying drone. They tried out different drones and documented the building process in some videos.
The first prototype was a kind of jetpack design. The four engines and propellers were designed to lift a man of 175lbs (80kg), plus the 45lbs (20kg) dead weight of the drone.
In this jetpack design, the human sits under the drone. Thus, the center of gravity is not in the geometric center of the four rotors but much further below. This makes the control extremely difficult, and the vehicle was unstable due to the flight controller and the positioning of the load.
It would have been much more difficult if the load had not been rigidly connected to the drone but instead over a rope. Each control movement makes the load vibrate, and then the drone begins to commute.
The solution was finally a hexacopter built from a bathtub. With this design, the load was in the geometric center of gravity, and this simplified the programming of the flight control.
The physics of heavy drones
The basics behind lifting machines straight up vertically is a vertical airflow down. Drones use spinning blades called rotors to push air down. Action is reaction, so the drone is lifted. The faster the rotors spin, the stronger the airflow is, and vice-versa.
To hover the drone plus the payload, the force of the airflow must be equal to the gravitation force. For a stable flight, drones have a minimum of three rotors.
To understand the physics of drones, you have to understand that every rotating mass produces an angular momentum opposite to the rotating direction of the mass. That is why a quadrocopter has two counterclockwise-spinning rotors (2,4) and two clockwise-spinning rotors (1,3). While the drone is hovering, the rotors spin with the same speed, and all angular momentums balance each other out.

When you turn a hovering drone from west to north, the flight controller uses the angular momentum of the rotors. It decreases the spinning speed of rotor 1 and 3 and increases the spinning speed of rotor 2 and 4. Therefore, the angular momentum of rotor 1 and 3 is reduced and that of 2 and 4 reinforced, which causes the drone to rotate clockwise. The mutual reduction and increasing of the rotational speeds is necessary to keep the sum of the lifting forces constant.
Drones fly forward if there is a forward thrust from the rotors, making the drone tilt forward. The flight controller also does this by decreasing the rotor speed of, for example, rotor 1 and 2 and increasing the motor speed of rotor 3 and 4. The angular momentums balance each other out, and the drone tilts forward.
Due to the tilt angle, the airflow of the rotors is not vertical. This angle determines the size of the forward thrust and thus the speed. All rotors have to rotate correspondingly faster so that the drone does not fly down due to the lost vertical airflow.
Why do heavy drones with big rotors have a longer flight time or a higher payload?
To answer that question, we have to take a look at the airflow of the rotors. The ideal airflow looks like a cylinder starting at the rotor and continuing downward. The velocity of the airflow produces air pressure, and the reaction is the lifting force. The real airflow, however, is more like the picture below on the left side.

In terms of theory, if you want your drone to be more efficient, you have to reduce the airflow velocity. For a hovering drone, the following equation of airflow velocity applies.
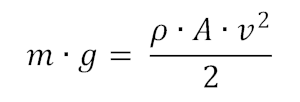
On the left side is the gravity force of the drone, where m is the mass of the drone and g is the gravitational acceleration (9.81 m/s²). On the other side is the force of the airflow, where ρ is the density of air (1.225 kg/m³), A is the area of the rotors, and v is the speed of the airflow.
Therefore, if you want to reduce the airflow velocity, you have to increase the rotor area.
The same applies to the power and flight time. The following equation shows that the power (P) of the drone depends on the airflow speed to the third power.
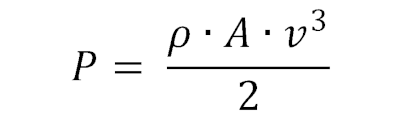
That is why bigger drones with bigger rotors have better flight performance than small drones.
What happens when a drone loses its payload during a flight?
Imagine holding a heavy sack of potatoes and it suddenly breaking. The potatoes will fall to the ground, and your hand will jump up.
Action is reaction, and the same applies to a drone losing its payload. In the first few milliseconds, the drone will jump up because the motor speed is high, which was necessary to lift the payload. After that, the flight controller will react to the spontaneous acceleration upward and reduce the motor speed immediately.
The worst case is when the payload is attached to the drone via two or three ropes and one of them breaks off. The payload is now off-center, which will tilt the drone. If the power of the drone is too low to level it horizontally, the drone will crash.
Can a drone fly when it’s windy?
How windy is too windy for a drone? Most commercial drones can be flown in wind between 10 and 30 mph. A drone’s maximum speed determines up to which wind speed it can be flown. A rule of thumb says that the wind may be up to two-thirds of the drone’s maximum speed. For example, a DJI Phantom 3 can fly up to 16 mph, so the allowed maximum wind speed is 10 mph.
Can a drone fly in the rain?
Is it possible to fly a drone in the rain? Generally, drones cannot fly in the rain because they are neither water-resistant nor waterproof. But there are some drone systems with different stages of water resistance. The critical parts are the motor and the electronic components.